Mathematically, a
vector
is a value consisting of a magnitude and a
direction[1].
It is interpreted geometrically as an arrow drawn from one point to
another. This interpretation implies a location for the vector, but
location is not an intrinsic property of vectors. To remove location
from the discussion, the beginning of the arrow is assumed to be
located at some given origin. A vector with an assumed origin is called a
position vector.
In Myron, composite values are used to represent points. It does not matter which of the
composite types are used: radial, vector or complex[2].
The radial type represents the
angle-magnitude form of a point and the vector type represents
the coordinate form of a point.
A complex value, being a composite type, represents a point in two-space.
Operations appropriate for each composite type are provided as
well as methods to convert between them.
In the discussion that
follows, the terms vector and position vector are
used in the mathematical sense and the terms vector and radial
when used together with the qualifiers type and value
refer to Myron types and values.
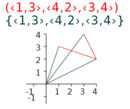
The plotter provides graphical representations of line segments and
position vectors by interpreting adjacent Myron vectors in a tuple
as line segments
and Myron vectors in a set as position vectors. Thus
((1, 3)ʋ, (4, 2)ʋ, (3, 4)ʋ)
is two line segments and
{(1, 3)ʋ, (4, 2)ʋ, (3, 4)ʋ}
is three position vectors. Figure
9.13
shows the plot of these collections.
Figure 9.13 Vectors
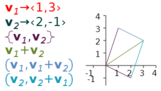
Addition and subtraction of vectors also has a geometric
interpretation. The sum of the vectors
v_1ʋ→(1, 3)ʋ
and
v_2ʋ→(2, -1)ʋ
is given simply by
v_1ʋ+v_2ʋ.
v_2ʋ
can be translated into a line segment whose origin is at
v_1ʋ
by
(v_1ʋ, v_1ʋ+v_2ʋ). Similarly,
v_1ʋ
can be translated by
(v_2ʋ, v_2ʋ+v_1ʋ). Plotting all these expressions yields the usual
vector-addition parallelogram in Figure
9.14.
Figure 9.14 Vector Addition
The simplicity of the vector expressions above belies behind-the
scenes details.
9.7.1 Vector Addition
Vector addition
falls into three cases: adding (or subtracting) two vectors, adding a vector and a
scalar and adding one type of vector onto another. The latter case is
described in
§9.7.4.
Addition and subtraction between two vector values are straightforward
applications of the rules for tuples with matching common types:
corresponding elements of a vector are added. Addition and subtraction
between two radial values uses conversion to and from intermediate vector
values. This means that addition of the innocuous looking
(1, ℼ/4)ɽ+(2, ℼ/6)ɽ
leads to
but evaluates to the simpler
(2.977197223086887, 0.6106424421303817)ɽ
(with more sub tabula precision than the three digits shown).
9.7.2 Scalar Multiplication
Scalar multiplication
of a vector has the effect of changing (scaling) the vector's length.
Multiplication of a line segment by a scalar changes both ends of the
line segment.
α⋅(v_1ʋ, v_2ʋ)
is
(α⋅v_1ʋ, α⋅v_2ʋ). To scale just the length of a line segment whose origin is not at
zero, the line segment has to be translated to the origin, scaled and
translated back. That is, given vectors
v_1ʋ→(1, 3)ʋ,
v_2ʋ→(2, -1)ʋ
and line segment
lsʈ→(v_1ʋ, v_2ʋ), the expression
(lsʈ-v_1ʋ)⋅2+v_1ʋ
is a line segment with origin
v_1ʋ
that has the same direction and twice the length of
lsʈ. This can be seen by performing substitutions and
simplification.
Using the radial type, a magnitude-angle pair is represented directly
by
(m, θ)ɽ. Multiplication by a scalar is straightforward:
2⋅(m, θ)ɽ
is
(2⋅m, θ)ɽ.
9.7.3 Vector Multiplication
Multiplying two vectors produces a scalar using a dot-product
operation. Syntactically, dot product is inferred for the multiplication
operator when the left operand is a row vector and the right operand is a column vector.
Thus
(v_1, v_2, v_3)ʋ∘(w_1, w_2, w_3)ƈ
produces
v_1⋅w_1+v_2⋅w_2+v_3⋅w_3.
Note the similarity of display between this and multiplication between a row matrix and a column matrix.
[(v_1, v_2, v_3)]×[(, w_1), (, w_2), (, w_3)] produces [(, v_1⋅w_1+v_2⋅w_2+v_3⋅w_3)]. However,
vector multiplication always produces a scalar whereas matrix multiplication always produces a matrix,
albeit a unit matrix in this
case.
Vector multiplication is not defined for other combinations of vectors. Expressions
with mixed operands are caught by the parser when the type of the result is important.
If mixed vectors are required by some mathematical context, explicit casts can be used
to specify conversions that conform to Myron's rules for vector multiplication.
Dot product should not be confused with the residual rule for tuples.
The tuple versions of the expressions above are
(v_1, v_2, v_3)⋅(w_1, w_2, w_3)
and
(v_1⋅w_1, v_2⋅w_2, v_3⋅w_3).
Applied to radial values, dot product uses an intermediate conversion
to vector values.
(m_1, θ_1)ɽ∘(m_2, θ_2)ɽ
produces the scalar value (after simplification)
m_1⋅m_2⋅(cos θ_1⋅cos θ_2+sin θ_1⋅sin θ_2)
.
9.7.4 Mixing Vector Types
When a composite value is mixed with an operand of another type under addition or
subtraction, the type of the result is the “highest” type
of either operand according to the ordering radial, column, row, matrix.
The operand not of the highest type is
converted to the highest type before the operation is applied. Thus
(m, θ)ɽ+(a, b)ʋ
produces
(m⋅cos θ+a, m⋅sin θ+b)ʋ
Forcing the row vector to a radial
(m, θ)ɽ+(a, b)ʋɽ
produces
If mixing composite types leads to uncertainty as to which automatic conversions
are applied, explicit casts can be used to remove the uncertainty.
9.7.5 Vector Example
To exercise Myron's approach to vectors, consider the problem of
drawing 12 vectors each leading from the centre of a clock to the
numbers on its face. The vectors can be generated by the expression
{(1, θ)ɽ|θ∈0, 2⋅ℼ, ℼ/6}. The generator produces a set of 12 vectors. The use of sets causes
the vectors to be plotted as position vectors. Contrast this with
((1, θ)ɽ|θ∈0, 2⋅ℼ+ℼ/6, ℼ/6)
which produces a tuple of 13 vectors. When plotted, the use of tuples
causes the position vectors to be treated as points and draws them as
12 continuous line segments. The results are shown in Figure
9.15.